
TM 5-6675-348-13&P
b.
System Setup.
Calibration allows the initial setting of all sensors. The calibration settings are then constants in the
Remote Interface Box's nonvolatile memory. After the initial calibration, the boom and arm sensors self-
align (reset) to a zero reference mark each time the boom and arm are moved through their normal
operating cycle.
(1)
Press MODE button to access MAIN MENU.
(2)
Point menu arrows to SETUP SYSTEM mode using Up and
Down (↑↓) buttons.
(3)
Press ENTER button to confirm selection.
To bypass the entry code, press and hold Up and Down (↑↓)
(4)
buttons at the same time, while pressing ENTER button.
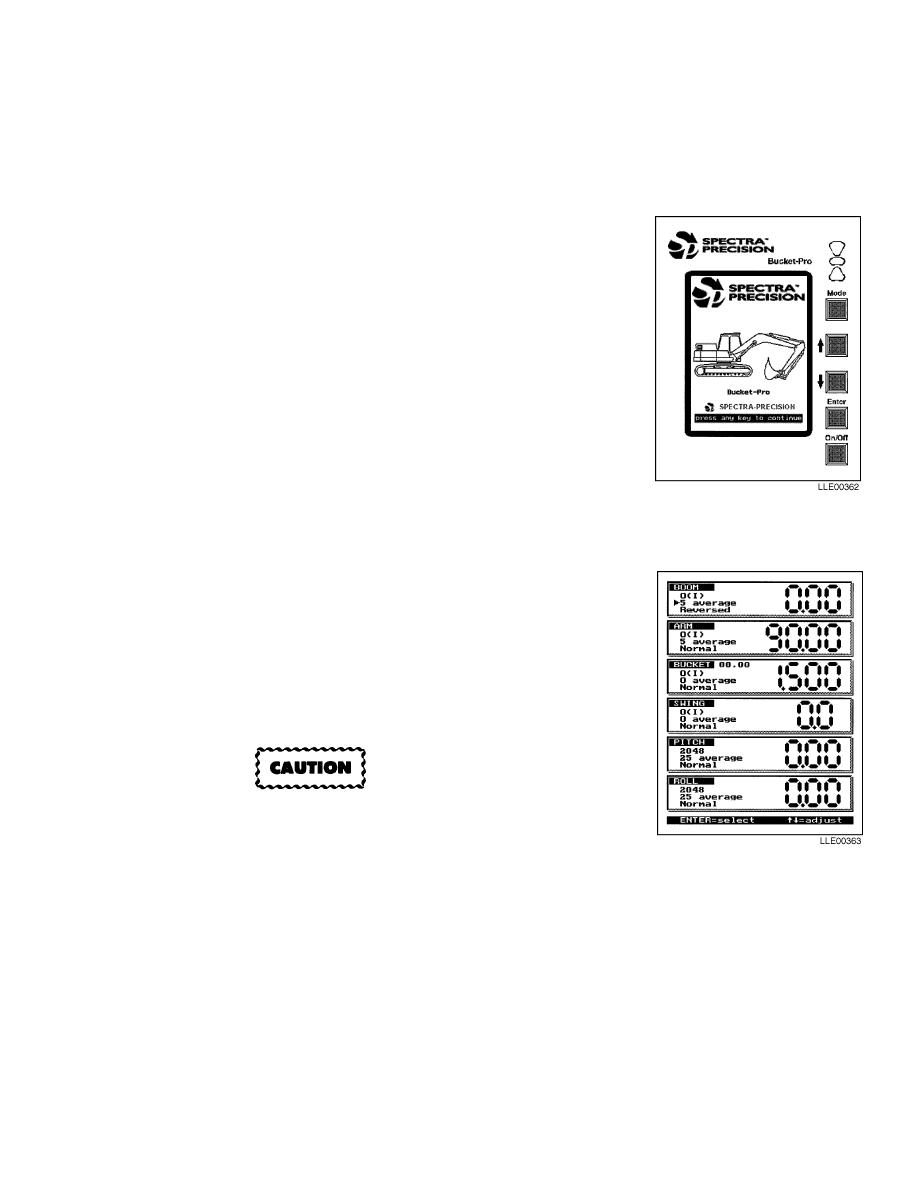
NOTE
VIEW SENSORS allow the raw data
values from the sensors and same
angle or position of the sensors to be
displayed on the screen.
These values determine proper orienta-
tion and operation of the sensors during
installation and troubleshooting.
Using the Up and Down (↑↓) buttons, select VIEW SENSORS.
(5)
(6)
Press ENTER button.
(7)
Ensure arm and boom averaging are set to 5 and count is
reversed.
(8)
Ensure arm angle increases as arm is moved away from
machine frame.
The machine measurements must be entered
before calibrating the system. Failure to enter
the machine measurement before calibration
will cause an incorrect calibration
(9)
Ensure boom angle increases as boom is raised.
(10) Ensure bucket counts properly.
(11) Ensure pitch and roll averaging are set to 25 and Normal for starting point.
(12) Ensure Arm and Boom Sensors locate reference mark (I) when machine is operated manually.
(13) Press ENTER button until SETUP menu is displayed.
4-65


 Previous Page
Previous Page
